- 課題: 企業のAIはチャットボットに偏りがちで、実運用へのコンピュータビジョン活用を見落としている。
- 解決策: エッジAI、画像認識(YOLO)、MediaPipeを倉庫ロボットの経路最適化や動作分析に適用する。
- 成果: 端末(エッジ)上で処理することで、すべてをクラウドへ送る場合より遅延とコストを削減する。
結論から言います。 物理的な運用現場(物流倉庫やスポーツなど)へAIを適用する場合、一般的なチャットボットシステムのようにデータをクラウドに上げる(Cloud AI)のではなく、端末側(エッジAI)でミリ秒単位の低遅延処理を行う必要があります。
TL;DR(エグゼクティブサマリー)
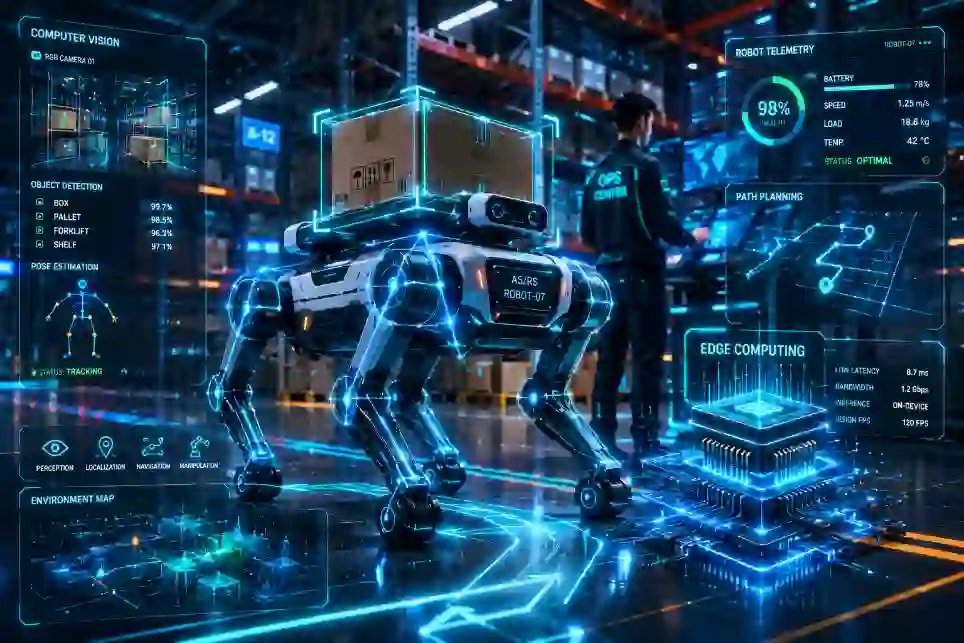
- 課題: サービス/物流ロボットのプロジェクトにおいて、ロボットは複雑な倉庫内の障害物を認識する必要がありました。ゴルフスイング分析プロジェクトでは、リアルタイムなフィードバックのために、プレイヤーの動きを超低遅延で分析するシステムが求められました。
- 解決策: ロボットの経路最適化(Path Optimization)には認識モデル(YOLO)を、ゴルフの骨格ポーズ分析にはMediaPipe/OpenCVを活用しました。どちらもハードウェア上で直接実行されるエッジAIアーキテクチャを採用しました。
- 結果: ロボットは倉庫環境で障害物を避け、経路を最適化しながら安全に稼働しました。ゴルフシステムは商用プロダクトとしてパッケージ化され、日本のテクノロジー展示会で成功裏にデモンストレーションされました。
エッジAIとは何か? クラウドAI(ChatGPT)との違い
AIと聞いて、ほとんどの経営者が思い浮かべるのはチャットボット(LLM)――テキストを入力し、AIが返答する仕組み――でしょう。これはクラウドAIです。あなたのデータはOpenAIやGoogleの巨大なサーバーに送られて処理され、結果が返ってきます。
しかし、システムアーキテクチャの観点から見ると、リアルタイムの物理的な運用においてクラウドAIは無力です。倉庫内を走行するロボットは、クラウドから「前方に障害物あり」という結果が返ってくるまで2秒も待つことはできません。棚に激突してしまいます。
そこで解決策となるのが**エッジAI(Edge AI)**です。AIモデル(YOLOやコンピュータビジョンなど)を圧縮し、ロボットに内蔵されたチップや工場のカメラ上で直接実行します。ここでのトレードオフは、ローカルハードウェアの限られた計算能力を利用する代わりに、**ゼロレイテンシ(遅延なし)とデータプライバシー(物理的なデータを外部に一切送信しない、100%の安全性)**を得ることです。
物流ロボットからゴルフスイング分析まで
ロボットAIトレーニングプロジェクトにおいて、核心となる課題は物体検出(Object Detection)でした。倉庫特有のデータセットでYOLOモデルを訓練することにより、ロボットは単に「障害物を避ける」だけでなく、経路最適化(Path Optimization)を実行し、待機したり遠回りしたりする時間を最小限に抑えました。
ゴルフスイング分析プロジェクトでは、システムはMediaPipeとOpenCV(Python)を介したコンピュータビジョン技術を利用しました。AIは、プレイヤーの身体にある数十箇所の骨格関節をリアルタイムで追跡(トラッキング)します。スイングの角度や腰の姿勢のわずかなズレも即座に計算され、画面に反映されます(リアルタイムフィードバック)。日本で展示される商用プロダクトとしてパッケージ化する上で、この低遅延が決定的な要因となりました。
非構造化データ(画像、動画、空間座標)こそが、テキストデータ以上に運用コストを最適化するための真の宝の山なのです。
よくある質問(Q&A)
Q: 製造業におけるクラウドAIとエッジAIの最大の違いは何ですか?
それは遅延(レイテンシ)とインターネットへの依存度です。工場内では、機械からの電波干渉によりWi-Fiネットワークが不安定になることがよくあります。エッジAIを利用すれば、インターネット接続が完全に途絶えたとしても、製品の外観をチェックする品質保証(QA/QC)カメラは数ミリ秒の応答速度で100%正確に稼働し続けます。
Q: エッジAIの導入には大規模なサーバーへの投資が必要ですか?
いいえ。エッジAIアーキテクチャは、Nvidia Jetson Nano、AIアクセラレータを組み合わせたRaspberry Pi、あるいはNPUチップを内蔵したAIカメラなど、安価で省電力な専用のエッジデバイスで実行するように設計されています。ハードウェアコストは、クラウドGPUを毎月レンタルするよりもはるかに安価です。
チャットボットはAIという氷山の一角に過ぎません。QA/QC、物流、スマートセキュリティカメラなど、物理的な運用ワークフローの最適化が必要な企業様は、私のAI自動化の対応領域をご覧いただくか、オーダーメイドシステムの設計についてご相談ください。
よくある質問
エッジAIはChatGPTのようなクラウドAIと何が違いますか?
エッジAIは現場の端末上でモデルを動かすため低遅延でネットワークに依存せず、カメラ・ロボット・センサーに適します。クラウドAIは大規模な言語処理に強い一方、データをサーバーへ送る必要があります。
コンピュータビジョンは運用のどんな業務に使えますか?
倉庫ロボットの経路最適化、画像による品質検査、物体のカウントと追跡、スポーツのような動作分析などです。共通点は、画像をリアルタイムの意思決定データに変えることです。